The importance and development of the mechanical principle of RV reducer for industrial robots
When we were in the era of infinite industrial robots, you knew that one of the most critical mechanical structures of industrial robots was the RV reducer. Today, China still does not have the design and manufacturing capabilities. During the “12th Five-Year Plan†period, the state’s “863†plan included it as a key technical bottleneck. The top universities and research institutes in China have only studied papers in a few years and have no physical objects.
Among all the core components of industrial robots, the speed reducer is the most critical.
The cost structure of industrial robots is roughly as follows: 22% for the main body, 25% for the servo system, 38% for the speed reducer, 10% for the control system, and 5% for the other. Simply split the cost of domestic 6-axis industrial robots (total cost of 250,000 yuan), it can be seen that the cost of the reducer and servo motor is close to 130,000 yuan, mainly based on imports.
Today, we will compile information on all parties and tell you about the RV reducer.
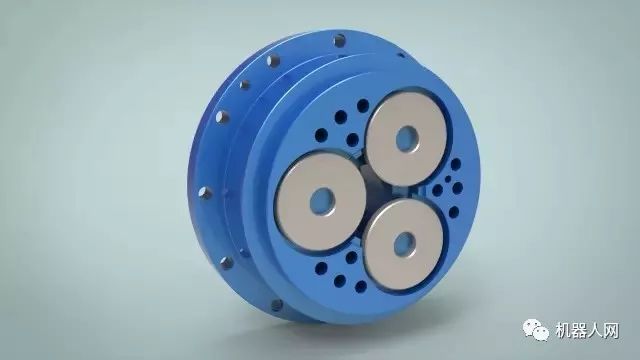
First, the mechanical principle of RV reducer
In 1926, the German Lorenz Bron creatively proposed a planetary gear mechanism with a small tooth difference. It uses an epicycloid as the tooth profile curve. This is the earliest pin-slewing planetary transmission because of the two meshes. One of the gears takes the form of a pin wheel, which is also known as a cycloid pinion planetary gear drive.
RV drive is a brand-new transmission method. It is developed on the basis of the traditional pin-pendulum planetary transmission. It not only overcomes the disadvantages of the general pin-pendulum transmission, but also has a small size, light weight, a large transmission ratio range, and a long service life. Accuracy, stability, high efficiency, smooth transmission and a series of advantages.
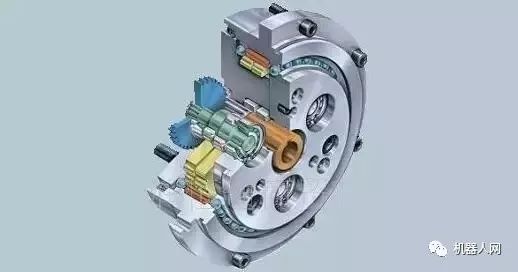
Take RV-E reducer as an example
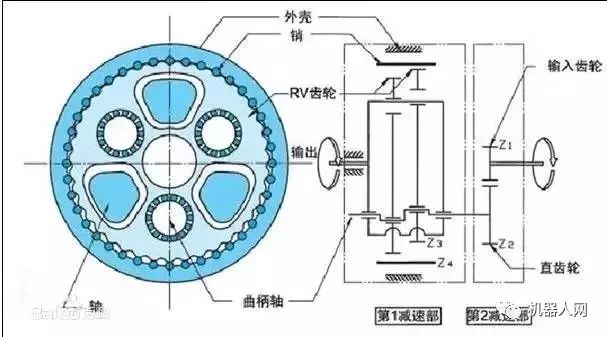
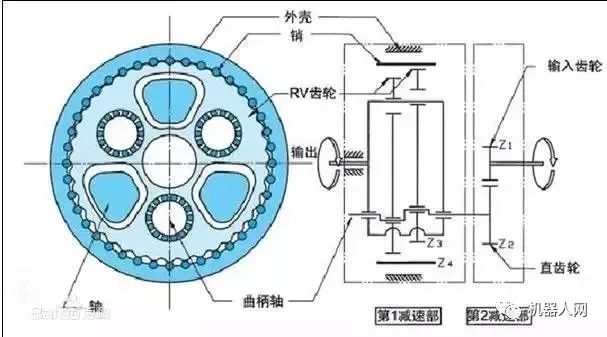
First deceleration section... Spur gear deceleration mechanism
The rotation of the input shaft is transmitted from the input gear to the spur gear and decelerated according to the gear ratio. This is the first deceleration section.
Second deceleration unit... Differential gear deceleration mechanism
The spur gear is connected to the crankshaft and becomes the input of the second deceleration portion. At the eccentric portion of the crankshaft, the RV gear is mounted through the rolling bearing. In addition, only one needle tooth, which is only a few more than the number of RV gears inside the housing, is arranged at the same pitch.
If the stationary housing rotates the spur gear, the RV gear also performs eccentric motion due to the eccentric motion of the crankshaft. If the crankshaft rotates one turn at this time, the RV gear will rotate one tooth in the opposite direction to the crankshaft. This rotation is output to the axis of the second deceleration unit. When the shaft is fixed, the housing side becomes the output side.
Nabtesco RV-110E Reducer
Second, the importance of RV reducer to industrial robots
Industrial robots use RV reducers for all joints from the first joint to the fourth joint, and harmonic reducers may be used for the fifth and sixth joints of light-duty industrial robots. Heavy-duty industrial robots require RV reducers for all joints. On average, each industrial robot uses 4.5 RV reducers. In 2013, the world’s industrial robots sold 180,000 units and used 900,000 speed reducers.
The power source of an industrial robot is generally an AC servo motor. Because the pulse signal is used to drive, the servo motor itself can achieve speed regulation. Why does the industrial robot also need a reducer? Industrial robots usually perform repetitive actions to complete the same process; in order to ensure that industrial robots can reliably complete process tasks in production and ensure process quality, the positioning accuracy and repeatability of industrial robots are highly demanding. Therefore, improving and ensuring the accuracy of industrial robots requires the use of RV reducers or harmonic reducers. Another role of the precision reducer in industrial robots is to deliver greater torque. When the load is large, it is uneconomical to increase the power of the servo motor blindly, and the output torque can be increased through the speed reducer within a suitable speed range. In addition, servo motors are prone to heat generation and low-frequency vibration at low-frequency operation, which is not conducive to ensuring accurate and reliable operation of industrial robots that work for a long time and periodically.
The presence of a precision reducer allows the servo motor to operate at a suitable speed and precisely reduces the speed to the speed required by various parts of the industrial robot, increasing the rigidity of the machine while outputting greater torque. Compared with the universal reducer, the industrial robot joint reducer requires the characteristics of short drive chain, small volume, large power, light weight, and easy control.
There are two main types of reducers used in joint-type industrial robots: RV reducers and harmonic reducers. Compared to harmonic reducers, RV reducers have higher stiffness and revolution accuracy. Therefore, in the articulated industrial robot, the RV reducer is generally placed on a heavy load such as a seat, a boom, and a shoulder, and a harmonic reducer is placed on the arm, wrist or hand; the planetary reducer is generally Used in rectangular coordinate industrial robots.
At the same time, the RV reducer has much higher fatigue strength, stiffness and life than the harmonic transmission commonly used in industrial robots, and the accuracy of the return difference is stable, unlike the harmonic transmission, the movement accuracy will be significantly reduced with the use of time. Therefore, many high-precision industrial robots in many countries in the world use RV reducers. Therefore, this RV reducer gradually replaces the development trend of harmonic reducers in advanced industrial robots.
Third, RV reducer development chronicles
1. In 1926, the German Lorenz Bron creatively proposed the principle of RV reducer
2. In 1931 Laurenz Bron created the "Secule" Co., Ltd. in Munich, Germany, and started the manufacture and sale of cycloid speed reducers.
3. In 1939, Japan's Sumitomo Corporation signed a technical cooperation agreement with "Secure" and produced and sold;
4. In 1944, the Japanese Teijin Seiki was established. This future RV reducer is overlord, and has made great achievements in aircraft manufacturing, textile machinery, and machine tools.
5. From 1950 to 1960, the emergence of cycloidal grinding machines solved the problem of low accuracy of the cycloidal tooth profile, which made the cycloidal drive further developed.
6. In 1956, Japan's Naboc released the world's first automatic door to show its prominence on the market.
7. Around 1980, the Teijin Precision Machinery Co., Ltd. proposed the RV drive theory and started to apply it to the industrial robot industry.
8. In 1986, the Japanese Teijin Seiki RV reducer was officially mass-produced and achieved success;
9. In 2003, Teijin Seiki and Nabok merged to form Nabtesco Corporation and achieved rapid development. Now it has become the leader in the RV reducer industry, occupying more than 60% of the market, especially in China. On heavy-duty industrial robots, the market share of its RV reducer is as high as 90%.
Fourth, China RV reducer industry development status
In terms of RV speed reducers, China began to study planetary gear transmissions from the 1950s and introduced them from abroad in the 1960s. Despite some achievements in theory and imitation, compared with the latest products of its kind in Japan, The cycloidal pin gear reducer we developed has a lot of deficiencies in terms of overall performance, service life, transmission accuracy, carrying capacity, and the further development and upgrading of new products.
The purchase price of a precision reducer such as ABB, Kuka and Yaskawa is between 30,000 and 50,000 yuan, which is approximately 70,000 yuan for Chinese companies, and approximately 120,000 yuan for ordinary companies. The giant is more than twice as expensive.
According to statistics of the Institute of Industrial Robot Industry (GRII), there are 353 industrial robot companies in China, of which only 13 are research reducers and only 5 are RV reducers.
In 2010, Nantong Zhenkang Welding Electromechanical Co., Ltd. developed RV deceleration devices and series of AC servo motors that can be used in high-end industrial applications (industrial robots) transmission core components, and were put into mass production, and were widely recognized in the market. In 2013, it produced more than 200 units.
On July 20th, 2014, Yu Yunqing, general manager of Wuhan Elite Reducer Manufacturing Co., Ltd. disclosed that a precision reducer independently developed by the company has just passed inspection and is expected to replace imports and reduce the cost of localization of industrial robots.
In July 2014, Qinchuan Development announced that it plans to invest 194 million yuan in the construction of 90,000 sets (one phase) of industrial robot joint reducer technological transformation projects. This move will promote the development and manufacturing of domestic industrial robot RV reducer to people's vision.
Among the listed companies, there are giant wheel shares and Xinsong industrial robots that are conducting research on RV reducers, but no substantive results have been obtained yet.
With the economic transformation and upgrading and the accelerated aging of the population in China, the development of the industrial robot industry ushered in a period of rapid development of demand. In 2013, the Chinese market sold nearly 37,000 industrial robots, accounting for about one-fifth of global sales. The total sales volume surpassed that of Japan and ranked first in the world. It is expected that China is expected to become the world's largest industrial robot market by 2016, and the number of possessions will exceed 150,000. Nabtesco plans to invest nearly 5 billion yen in a new plant in China. Since 2016, it will begin production of core components for industrial robots - RV reducers. It plans to produce 100,000 units per year and 200,000 units by 2020.
With such a large market demand, at present, it is almost irrelevant to Chinese companies. We expect that Chinese companies will soon be able to break through the technological bottlenecks and win the market.
LAN CABLE Cat5e/Cat6/Cat7/Cat8 Cable
CIXI LANGUANG PHOTOELECTRIC TECHNOLOGY CO..LTD , https://www.cxblueray.com